Point Cloud Workflows in FARO SphereXG
We’re excited to introduce three enhancements to FARO Sphere XG that improve integration with the FARO Orbis Mobile Laser Scanner and the FARO Connect Software.
Original Source - FARO Technologies
Attention Orbis users on Sphere XG: Managing, registering, and aligning your Orbis scans in Sphere XG just got easier, thanks to a trio of enhancements released for the digital reality platform.
Navigate High-Definition Orbis Flash Scans within Sphere XG
Uploading point clouds from the Stream App to Sphere XG now automatically includes your detailed Flash scans. That’s right; Sphere XG intelligently recognises Orbis Flash scans and automatically imports and aligns them within your point cloud without added effort.
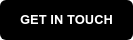
Once uploaded, you can expect a new “Flash scan” toggle when viewing point cloud data in Sphere XG’s Walk or 3D mode. View and manage your 360° photos, BIM models, point cloud data, and now Flash scans, all through a unified platform.
New Two-Way Synchronisation between FARO Connect and Sphere XG
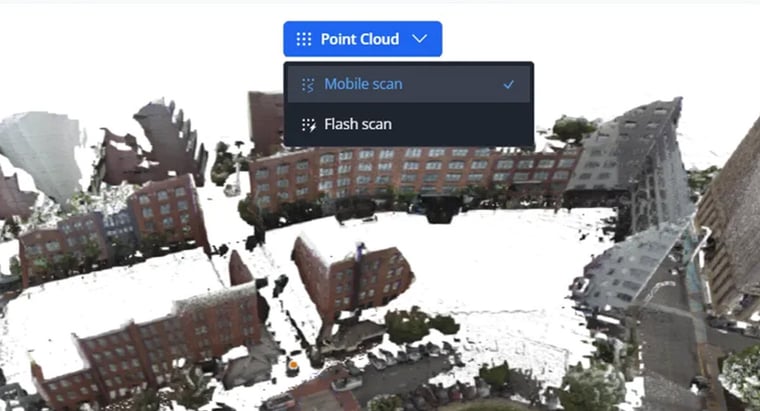
Users who often find themselves switching between Connect and Sphere XG celebrate! We’ve implemented a two-way synchronisation between both platforms, enabling you to sync any project you have access to on Sphere XG directly with Connect. You can download data from Sphere XG, run advanced filters, and upload the changes to Sphere XG for the team to utilise.
Intelligent Point Cloud Registration in Sphere XG
Introducing an innovative new feature within Sphere XG that registers and merges two fully processed 3D scans in the cloud, without needing desktop software. Consolidate your scans into one by just ensuring an overlap of scanned areas.
Optimised for Orbis users, you can now unify and register large captures of the same sheet into a single-point cloud project with Sphere XG. Visually align your point clouds and click the Run Automatic Registration button to begin the process. You can then approve or readjust the scans before publishing them as a merged point cloud.